When did you start building this robot, and how long did it take?
10/25/2025
The project took approximately three months to complete.
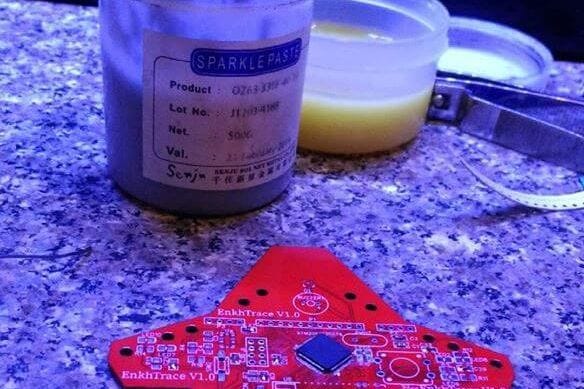
EnkhTrace Robot Soldering
What was the most challenging aspect you encountered?
The most challenging part was the line-following coding, which involved complex formulas, including PID control. On the technical side, the motor setup was particularly difficult, especially dealing with motor encoders and torque. The motor’s torque and speed are crucial for the performance of the line-following robot.
Enkhbold Ganbold EnkhTrace Line Follower PID

Robot Specifications:
Total Weight & Dimensions: 150g; 150cm x 151cm x 2.6cm
Maximum Speed: 3–4 m/s on a straight path
Battery: 7.4V 2S LiPo battery, 650mAh
Motor & Reduction System: Gear reduction ratio of 46:15 (3.06). The motor’s maximum speed is 14,800 RPM at 12V without gear reduction, which translates to 4,933 RPM with the reduction.
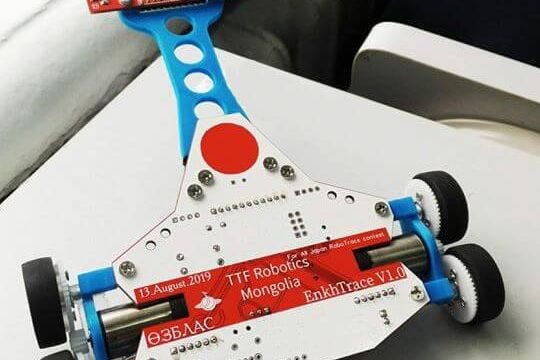
EnkhTrace Line Follower Robot first build

What is more important in your robot: torque or speed?
Speed is the more important factor for this robot.
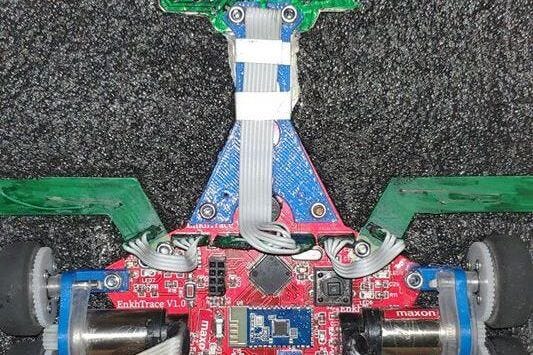
Electronics Overview:
Microcontroller: STM32F103R8T6 MCU
Complementary Circuits:
5V 3A step-down buck regulator
TB6612 motor driver
QRE1113 IR sensor
LY3200ALH gyroscope
JDY30 Bluetooth module
Round buzzer
Untitled

PCB Manufacturing:
I designed and manufactured the PCBs using JLCPCB.
Sensors and Features:
Sensors Used: 10 IR sensors, 2 motor encoders, gyroscope sensor
Edge Sensor & Opponent Sensor Features: N/A
Competitions and Awards:
The robot won 2nd place twice in the National Robot Contest and 3rd place in the Robot Challenge Erdenet contest.
Future Plans for the Robot:
I plan to upgrade the robot with a camera for enhanced line-following capabilities.
Acknowledgment of JSumo Products:
I did once copy the design from the JSumo Storm line follower — what a learning experience!
General Part List:
MCU: STM32F103R8T6, 64MHz (with 8MHz external RC)
Motor Driver: TB6612FNG SMD
Motor: PORTESCAP 14,800 RPM at 12V, geared to 1:3, resulting in 4,933 RPM
Servo: MG90
Wheel Rubber: Paper load rubber from a printer
Sensor: QRE1113
Battery: LiPo 7.4V, 650mAh
Bluetooth Module: Bluetooth 5.0 JDY-30
SMD Resistor Sizes: 0402, 0603, 0805, 1206
Regulator: 5V 3A buck step-down
Motor Mount: 3D-printed or CNC
Gears: 46 teeth (on wheel), 15 teeth (on motor shaft)
Wheels: Acrylic, milled by CNC, with 8 bearings used on the wheels
EnkhTrace Line Follower Robot
Software Used:
SOLIDWORKS, EasyEDA, Keil, STM32CubeMX, Altium Designer, Autodesk Inventor
EnkhTrace Line Follower Robot
First Publish: https://blog.jsumo.com/enkhtrace-v1-3-ttf-robotics-mongolia/